享元模式
游戏设计模式Design Patterns Revisited
迷雾散尽,露出了古朴庄严的森林。古老的铁杉,在头顶编成绿色穹顶。 阳光在树叶间破碎成金色顶棚。从树干间远眺,远处的森林渐渐隐去。
这是我们游戏开发者梦想的超凡场景,这样的场景通常由一个模式支撑着,它的名字低调至极:享元模式。
森林
用几句话就能描述一片巨大的森林,但是在实时游戏中做这件事就完全是另外一件事了。 当屏幕上需要显示一整个森林时,图形程序员看到的是每秒需要送到GPU六十次的百万多边形。
我们讨论的是成千上万的树,每棵都由上千的多边形组成。 就算有足够的内存描述森林,渲染的过程中,CPU到GPU的部分也太过繁忙了。
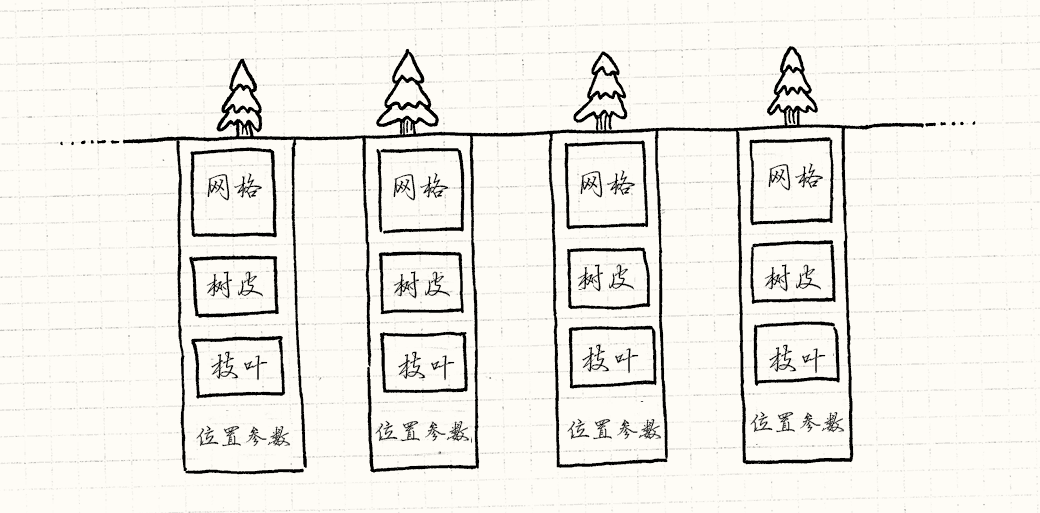
每棵树都有一系列与之相关的位:
- 定义树干,树枝和树叶形状的多边形网格。
- 树皮和树叶的纹理。
- 在森林中树的位置和朝向。
- 大小和色彩之类的调节参数,让每棵树都看起来与众不同。
如果用代码表示,那么会得到这样的东西:
class Tree { private: Mesh mesh_; Texture bark_; Texture leaves_; Vector position_; double height_; double thickness_; Color barkTint_; Color leafTint_; };
这是一大堆数据,多边形网格和纹理体积非常大。 描述整个森林的对象在一帧的时间就交给GPU实在是太过了。 幸运的是,有一种老办法来处理它。
关键点在于,哪怕森林里有千千万万的树,它们大多数长得一模一样。 它们使用了相同的网格和纹理。 这意味着这些树的实例的大部分字段是一样的。
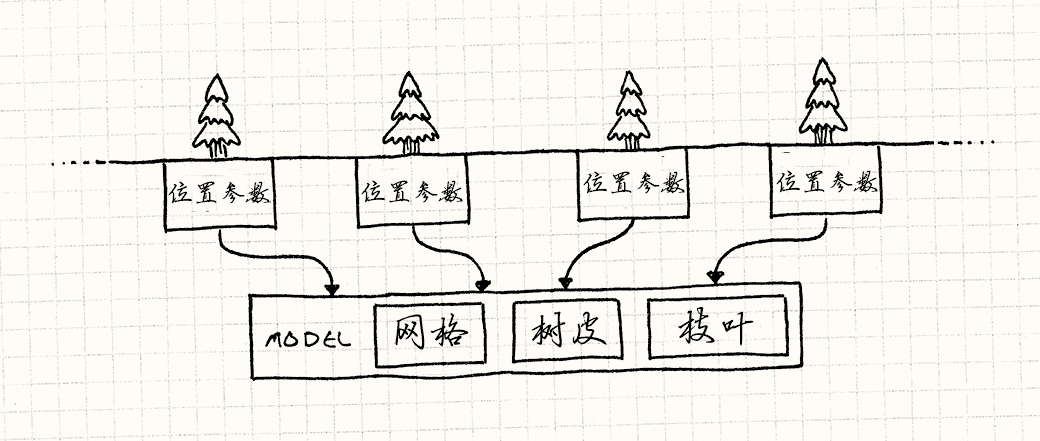
我们可以通过显式地将对象切为两部分来更加明确地模拟。 第一,将树共有的数据拿出来分离到另一个类中:
class TreeModel { private: Mesh mesh_; Texture bark_; Texture leaves_; };
游戏只需要一个这种类,
因为没有必要在内存中把相同的网格和纹理重复一千遍。
游戏世界中每个树的实例只需有一个对这个共享TreeModel的引用。
留在Tree中的是那些实例相关的数据:
class Tree { private: TreeModel* model_; Vector position_; double height_; double thickness_; Color barkTint_; Color leafTint_; };
你可以将其想象成这样:
把所有的东西都存在主存里没什么问题,但是这对渲染也毫无帮助。 在森林到屏幕上之前,它得先到GPU。我们需要用显卡可以识别的方式共享数据。
一千个实例
为了减少需要推送到GPU的数据量,我们想把共享的数据——TreeModel——只发送一次。
然后,我们分别发送每个树独特的数据——位置,颜色,大小。
最后,我们告诉GPU,“使用同一模型渲染每个实例”。
幸运的是,今日的图形接口和显卡正好支持这一点。 这些细节很繁琐且超出了这部书的范围,但是Direct3D和OpenGL都可以做实例渲染。
在这些API中,你需要提供两部分数据流。 第一部分是一块需要渲染多次的共同数据——在例子中是树的网格和纹理。 第二部分是实例的列表以及绘制第一部分时需要使用的参数。 然后调用一次渲染,绘制整个森林。
享元模式
好了,我们已经看了一个具体的例子,下面我介绍模式的通用部分。 享元,就像它的名字暗示的那样, 当你需要共享类时使用,通常是因为你有太多这种类了。
实例渲染时,每棵树通过总线送到GPU消耗的更多是时间而非内存,但是基本要点是一样的。
这个模式通过将对象的数据分为两种来解决这个问题。 第一种数据没有特定指明是哪个对象的实例,因此可以在它们间分享。 Gof称之为固有状态,但是我更喜欢将其视为“上下文无关”部分。 在这里的例子中,是树的网格和纹理。
数据的剩余部分是变化状态,那些每个实例独一无二的东西。 在这个例子中,是每棵树的位置,拉伸和颜色。 就像这里的示例代码块一样,这种模式通过在每个对象出现时共享一份固有状态来节约内存。
就目前而言,这看上去像是基础的资源共享,很难被称为一种模式。
部分原因是在这个例子中,我们可以为共享状态划出一个清晰的身份:TreeModel。
我发现,当共享对象没有有效定义的实体时,使用这种模式就不那么明显(使用它也就越发显得精明)。 在那些情况下,这看上去是一个对象被魔术般地同时分配到了多个地方。 让我展示给你另外一个例子。
扎根之所
这些树长出来的地方也需要在游戏中表示。 这里可能有草,泥土,丘陵,湖泊,河流,以及其它任何你可以想到的地形。 我们基于区块建立地表:世界的表面被划分为由微小区块组成的巨大网格。 每个区块都由一种地形覆盖。
每种地形类型都有一系列特性会影响游戏玩法:
- 决定了玩家能够多快地穿过它的移动开销。
- 表明能否用船穿过的水域标识。
- 用来渲染它的纹理。
因为我们游戏程序员偏执于效率,我们不会在每个区块中保存这些状态。 相反,一个通用的方式是为每种地形使用一个枚举。
enum Terrain { TERRAIN_GRASS, TERRAIN_HILL, TERRAIN_RIVER // 其他地形 };
然后,世界管理巨大的网格:
class World { private: Terrain tiles_[WIDTH][HEIGHT]; };
为了获得区块的实际有用的数据,我们做了一些这样的事情:
int World::getMovementCost(int x, int y) { switch (tiles_[x][y]) { case TERRAIN_GRASS: return 1; case TERRAIN_HILL: return 3; case TERRAIN_RIVER: return 2; // 其他地形…… } } bool World::isWater(int x, int y) { switch (tiles_[x][y]) { case TERRAIN_GRASS: return false; case TERRAIN_HILL: return false; case TERRAIN_RIVER: return true; // 其他地形…… } }
你知道我的意思了。这可行,但是我觉得很丑。 移动开销和水域标识是区块的数据,但在这里它们散布在代码中。 更糟的是,简单地形的数据被众多方法拆开了。 如果能够将这些包裹起来就好了。毕竟,那是我们设计对象的目的。
如果我们有实际的地形类就好了,像这样:
class Terrain { public: Terrain(int movementCost, bool isWater, Texture texture) : movementCost_(movementCost), isWater_(isWater), texture_(texture) {} int getMovementCost() const { return movementCost_; } bool isWater() const { return isWater_; } const Texture& getTexture() const { return texture_; } private: int movementCost_; bool isWater_; Texture texture_; };
但是我们不想为每个区块都保存一个实例。 如果你看看这个类内部,你会发现里面实际上什么也没有, 唯一特别的是区块在哪里。 用享元的术语讲,区块的所有状态都是“固有的”或者说“上下文无关的”。
鉴于此,我们没有必要保存多个同种地形类型。
地面上的草区块两两无异。
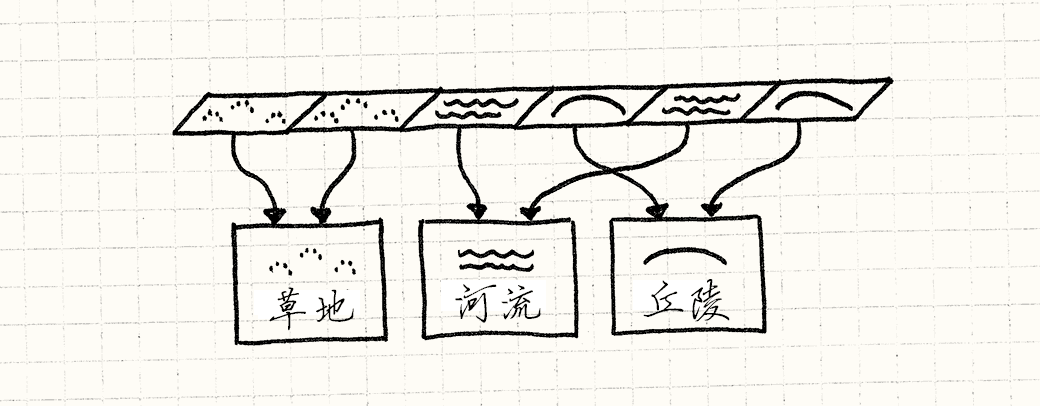
我们不用地形区块对象枚举构成世界网格,而是用Terrain对象指针组成网格:
class World { private: Terrain* tiles_[WIDTH][HEIGHT]; // 其他代码…… };
每个相同地形的区块会指向相同的地形实例。
由于地形实例在很多地方使用,如果你想要动态分配,它们的生命周期会有点复杂。 因此,我们直接在游戏世界中存储它们。
class World { public: World() : grassTerrain_(1, false, GRASS_TEXTURE), hillTerrain_(3, false, HILL_TEXTURE), riverTerrain_(2, true, RIVER_TEXTURE) {} private: Terrain grassTerrain_; Terrain hillTerrain_; Terrain riverTerrain_; // 其他代码…… };
然后我们可以像这样来描绘地面:
void World::generateTerrain() { // 将地面填满草皮. for (int x = 0; x < WIDTH; x++) { for (int y = 0; y < HEIGHT; y++) { // 加入一些丘陵 if (random(10) == 0) { tiles_[x][y] = &hillTerrain_; } else { tiles_[x][y] = &grassTerrain_; } } } // 放置河流 int x = random(WIDTH); for (int y = 0; y < HEIGHT; y++) { tiles_[x][y] = &riverTerrain_; } }
现在不需要World中的方法来接触地形属性,我们可以直接暴露出Terrain对象。
const Terrain& World::getTile(int x, int y) const { return *tiles_[x][y]; }
用这种方式,World不再与各种地形的细节耦合。
如果你想要某一区块的属性,可直接从那个对象获得:
int cost = world.getTile(2, 3).getMovementCost();
我们回到了操作实体对象的API,几乎没有额外开销——指针通常不比枚举大。
性能如何?
我在这里说几乎,是因为性能偏执狂肯定会想要知道它和枚举比起来如何。 通过解引用指针获取地形需要一次间接跳转。 为了获得移动开销这样的地形数据,你首先需要跟着网格中的指针找到地形对象, 然后再找到移动开销。跟踪这样的指针会导致缓存不命中,降低运行速度。
就像往常一样,优化的金科玉律是需求优先。 现代计算机硬件过于复杂,性能只是游戏的一个考虑方面。 在我这章做的测试中,享元较枚举没有什么性能上的损失。 享元实际上明显更快。但是这完全取决于内存中的事物是如何排列的。
我可以自信地说使用享元对象不会搞到不可收拾。 它给了你面向对象的优势,而且没有产生一堆对象。 如果你创建了一个枚举,又在它上面做了很多分支跳转,考虑一下这个模式吧。 如果你担心性能,那么至少在把代码编程为难以维护的风格之前先做些性能分析。
参见
-
在区块的例子中,我们只是为每种地形创建一个实例然后存储在
World中。 这也许能更好找到和重用这些实例。 但是在多数情况下,你不会在一开始就创建所有享元。如果你不能预料哪些是实际上需要的,最好在需要时才创建。 为了保持共享的优势,当你需要一个时,首先看看是否已经创建了一个相同的实例。 如果确实如此,那么只需返回那个实例。
这通常意味需要将构造函数封装在查询对象是否存在的接口之后。 像这样隐藏构造指令是工厂方法的一个例子。
-
为了返回一个早先创建的享元,需要追踪那些已经实例化的对象池。 正如其名,这意味着对象池是存储它们的好地方。
-
当使用状态模式时, 经常会出现一些没有任何特定字段的“状态对象”。 这个状态的标识和方法都很有用。 在这种情况下,你可以使用这个模式,然后在不同的状态机上使用相同的对象实例。